宁波材料所在复杂机电系统的集成优化设计方法上取得进展
相比序列式设计方法,集成优化设计方法可以加速复杂系统的迭代设计流程,获得更好的整体性能。将装备的机械、电气和控制参数集总到动态模型的反馈增益矩阵中,并运用最优控制理论进行设计,可以使产线在局部快速重构下保持最优性能。但受机械结构、驱动方案、控制器架构等因素影响,动态模型的反馈增益矩阵存在结构约束,无法运用黎卡提方程来求解,制约了最优控制理论在系统集成优化设计中的应用。
中国科学院宁波材料技术与工程研究所精密驱动与智能机器人技术团队博士生袁黎明,在陈思鲁研究员、张驰研究员、杨桂林研究员指导下,提出了一种基于参数空间优化的结构最优控制方法,如图1所示。该方法首先建立了带行内与列内元素间约束的反馈增益矩阵双线性分解法则,将集成优化设计问题转化为一个纯分散式控制系统的优化设计问题。随后,设计了一个包含系统状态与控制输入的参数空间,建立了将状态空间的系统动态及反馈结构约束映射到该参数空间的法则,从而将带非凸约束下的结构最优控制问题转化为迭代凸规划问题。在数值计算中,面向迭代对偶单纯形线性规划算法,完善了约束条件增补逻辑,实现了迭代中一次性生成多个切平面,提高了计算效率。相关方法可用于刚柔耦合系统、冗余驱动系统及欠驱动系统的集成优化设计,如图2所示。
相关论文以“Parameter Space Optimization for Robust Controller Synthesis with Structured Feedback Gain”为题发表在IEEE Transactions on Cybernetics上(DOI:10.1109/TCYB.2022.3166775)。该研究得到国家自然科学基金(51875554,U2020282,U1609206)和中国科学院机器人与智能制造创新研究院自主项目(C2021001)的资助。

图1 基于参数空间优化的结构最优控制方法
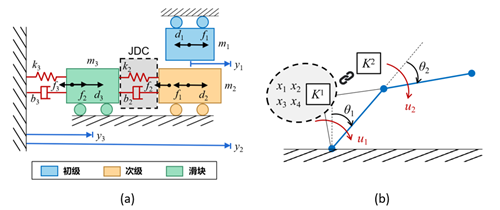
图2 集成优化设计案例:(a)跃度解耦装置,(b)二级倒立摆
(先进制造所 陈思鲁)